During this month, I have worked on the following tasks for Debian LTS and ELTS. This was my first month as LTS/ELTS contributor, including technical onboarding and initial setup of workflows. Thanks to Freexian and sponsors for making this possible [0].
During this month, I have worked on the following tasks for Debian LTS and ELTS. This was my initial contact with the LTS/ELTS project and preparation of security updates. Thanks to Freexian and sponsors for making this possible [0].
With the work that has been done in the debian-installer/netcfg merge-proposal !9 it is possible to install a standard Debian system, using the normal Debian-Installer (d-i) mini.iso images, that will come pre-installed with Netplan and all network configuration structured in /etc/netplan/.
In this write-up, I’d like to run you through a list of commands for experiencing the Netplan enabled installation process first-hand. Let’s start with preparing a working directory and installing the software dependencies for our virtualized Debian system:
Next we’ll prepare a VM, by copying the EFI firmware files, preparing some persistent EFIVARs file, to boot from FS0:\EFI\debian\grubx64.efi, and create a virtual disk for our machine:
Finally, let’s launch the debian-installer using a preseed.cfg file, that will automatically install Netplan (netplan-generator) for us in the target system. A minimal preseed file could look like this:
For this demo, we’re installing the full netplan.io package (incl. the interactive Python CLI), as well as the netplan-generator package and systemd-resolved, to show the full Netplan experience. You can choose the preseed file from a set of different variants to test the different configurations:
We’re using the linux kernel and initrd.gz here to be able to pass the preseed URL as a parameter to the kernel’s cmdline directly. Launching this VM should bring up the official debian-installer in its netboot/gtk form:
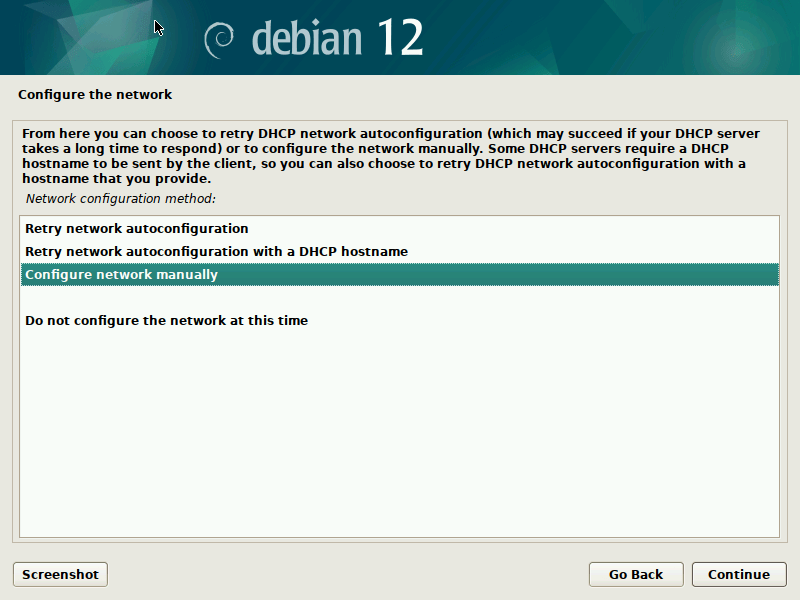
Now you can click through the normal Debian-Installer process, using mostly default settings. Optionally, you could play around with the networking settings, to see how those get translated to /etc/netplan/ in the target system.
After you confirmed your partitioning changes, the base system gets installed. I suggest not to select any additional components, like desktop environments, to speed up the process.
During the final step of the installation (finish-install.d/55netcfg-copy-config) d-i will detect that Netplan was installed in the target system (due to the preseed file provided) and opt to write its network configuration to /etc/netplan/ instead of /etc/network/interfaces or /etc/NetworkManager/system-connections/.
Done! After the installation finished, you can reboot into your virgin Debian Sid/Trixie system.
To do that, quit the current Qemu process, by pressing Ctrl+C and make sure to copy over the EFIVARS.fd file that was modified by grub during the installation, so Qemu can find the new system. Then reboot into the new system, not using the mini.iso image any more:
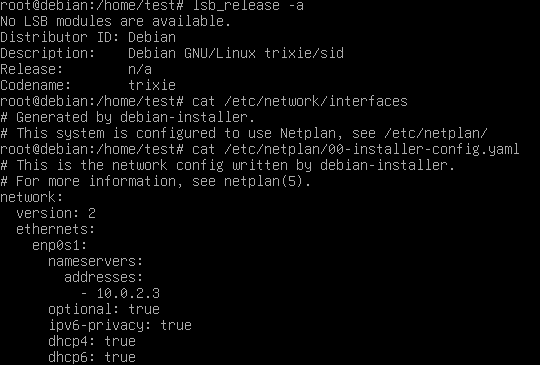
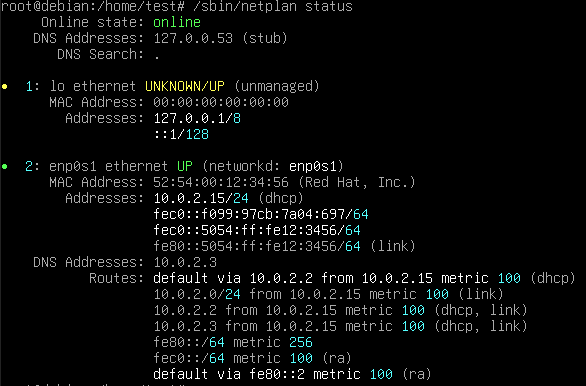
Finally, you can play around with your Netplan enabled Debian system! As you will find, /etc/network/interfaces exists but is empty, it could still be used (optionally/additionally). Netplan was configured in /etc/netplan/ according to the settings given during the d-i installation process.
In our case, we also installed the Netplan CLI, so we can play around with some of its features, like netplan status:
Thank you for following along the Netplan enabled Debian installation process and happy hacking! If you want to learn more, find us at GitHub:netplan.
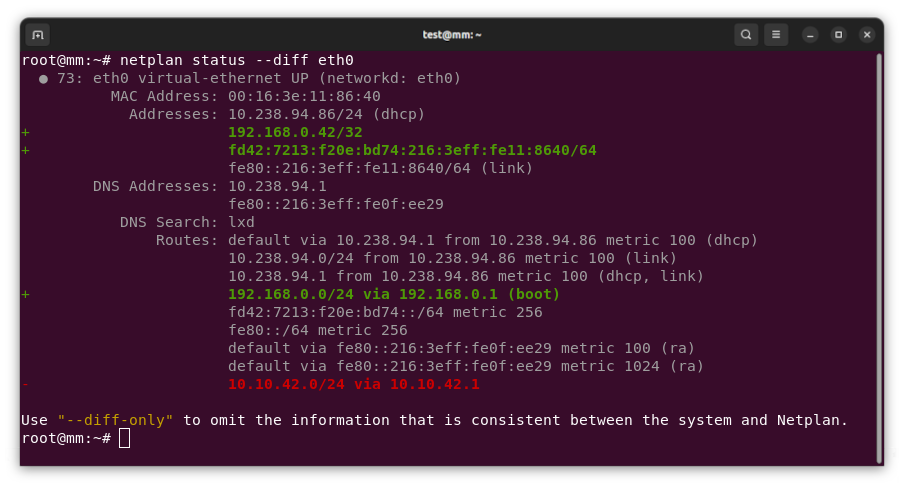
New “netplan status –diff” subcommand, finding differences between configuration and system state
As the maintainer and lead developer for Netplan, I’m proud to announce the general availability of Netplan v1.0 after more than 7 years of development efforts. Over the years, we’ve so far had about 80 individual contributors from around the globe. This includes many contributions from our Netplan core-team at Canonical, but also from other big corporations such as Microsoft or Deutsche Telekom. Those contributions, along with the many we receive from our community of individual contributors, solidify Netplan as a healthy and trusted open source project. In an effort to make Netplan even more dependable, we started shipping upstream patch releases, such as 0.106.1 and 0.107.1, which make it easier to integrate fixes into our users’ custom workflows.
With the release of version 1.0 we primarily focused on stability. However, being a major version upgrade, it allowed us to drop some long-standing legacy code from the libnetplan1 library. Removing this technical debt increases the maintainability of Netplan’s codebase going forward. The upcoming Ubuntu 24.04 LTS and Debian 13 releases will ship Netplan v1.0 to millions of users worldwide.
Highlights of version 1.0
In addition to stability and maintainability improvements, it’s worth looking at some of the new features that were included in the latest release:
Simultaneous WPA2 & WPA3 support.
Introduction of a stable libnetplan1 API.
Mellanox VF-LAG support for high performance SR-IOV networking.
New hairpin and port-mac-learning settings, useful for VXLAN tunnels with FRRouting.
New netplan status –diff subcommand, finding differences between configuration and system state.
Besides those highlights of the v1.0 release, I’d also like to shed some light on new functionality that was integrated within the past two years for those upgrading from the previous Ubuntu 22.04 LTS which used Netplan v0.104:
We added support for the management of new network interface types, such as veth, dummy, VXLAN, VRF or InfiniBand (IPoIB).
Wireless functionality was improved by integrating Netplan with NetworkManager on desktop systems, adding support for WPA3 and adding the notion of a regulatory-domain, to choose proper frequencies for specific regions.
To improve maintainability, we moved to Meson as Netplan’s buildsystem, added upstream CI coverage for multiple Linux distributions and integrations (such as Debian testing, NetworkManager, snapd or cloud-init), checks for ABI compatibility, and automatic memory leak detection.
We increased consistency between the supported backend renderers (systemd-networkd and NetworkManager), by matching physical network interfaces on permanent MAC address, when the match.macaddress setting is being used, and added new hardware offloading functionality for high performance networking, such as Single-Root IO Virtualisation virtual function link-aggregation (SR-IOV VF-LAG).
The much improved Netplan documentation, that is now hosted on “Read the Docs”, and new command line subcommands, such as netplan status, make Netplan a well vested tool for declarative network management and troubleshooting.
Integrations
Those changes pave the way to integrate Netplan in 3rd party projects, such as system installers or cloud deployment methods. By shipping the new python3-netplan Python bindings to libnetplan, it is now easier than ever to access Netplan functionality and network validation from other projects. We are proud that the Debian Cloud Team chose Netplan to be the default network management tool in their official cloud-images for Debian Bookworm and beyond. Ubuntu’s NetworkManager package now uses Netplan as it’s default backend on Ubuntu 23.10 Desktop systems and beyond. Further integrations happened with cloud-init and the Calamares installer.
I’m happy to announce that Netplan version 0.107 is now available on GitHub and is soon to be deployed into a Linux installation near you! Six months and more than 200 commits after the previous version (including a .1 stable release), this release is brought to you by 8 free software contributors from around the globe.
Highlights
Highlights of this release include the new configuration types for veth and dummy interfaces:
Furthermore, we implemented CFFI based Python bindings on top of libnetplan’s API, that can easily be consumed by 3rd party applications (see full cffi-bindings.py example):
from netplan import Parser, State, NetDefinition
from netplan import NetplanException, NetplanParserException
parser = Parser()
# Parse the full, existing YAML config hierarchy
parser.load_yaml_hierarchy(rootdir='/')
# Validate the final parser state
state = State()
try:
# validation of current state + new settings
state.import_parser_results(parser)
except NetplanParserException as e:
print('Error in', e.filename, 'Row/Col', e.line, e.column, '->', e.message)
except NetplanException as e:
print('Error:', e.message)
# Walk through ethernet NetdefIDs in the state and print their backend
# renderer, to demonstrate working with NetDefinitionIterator &
# NetDefinition
for netdef in state.ethernets.values():
print('Netdef', netdef.id, 'is managed by:', netdef.backend)
print('Is it configured to use DHCP?', netdef.dhcp4 or netdef.dhcp6)
Soon this year’s OpenPhoenux Hard- & Software Workshop (OHSW) will take place in Garching (near Munich) at the TUM Campus in Garching. There will be a lot of intetresting topics to discuss and people to meet. Make sure to drop by if you find some time!
The agenda and further details are now available online:
Recently, I attented a seminar at university and created a paper named “What’s New in the Linux Network Stack?”. As the content of my paper might be of interest to some people in the community, I decided to publish it here.
Abstract
In this paper, interesting features of the Linux kernel’s network stack are analyzed, which were introduced during the development cycles from Linux v3.7 to Linux v3.16. Special attention is given to the low-latency device polling, introduced in Linux v3.11, the netfilter’s SYNPROXY target, introduced in Linux v3.12 and the new Nftables framework, introduced in Linux v3.13. At the end a trend is presented, which shows the direction in which the Linux network stack is evolving.
Feel free to study, improve and build upon my work as desired! Feedback is welcome.
Update: This paper is now formally released in the “Proceedings of the Seminars Future Internet (FI) and Innovative Internet Technologies and Mobile Communications (IITM)”, which can be found here: DOI: 10.2313/NET-2015-03-1
The LinuxTag 2013 is over, and I want to share some brief impressions I got during our stay in Berlin.
The LinuxTag is a nice and well organized FOSS exhibition in Germany, attracting more than 10.000 visitors during 4 days.
We gave a talk about the OpenPhoenux project at the 2nd evening and had about 60 listeners. Some of them got very interested and followed us to the booth afterwards. For everyone who couldn’t participate, the slides are available online: Slides.pdf
We shared a booth with some other “Linux & Embedded” projects, namely: OpenEmbedded, Ethernut, Nut/OS, Oswald/Metawatch. Our Booth was professionally looking and I think we got quite some people interested in the project. Basically we had a constant flow of people at the booth during our 3 days stay and the overall feedback was rather positive!
We got interviewed by the “GNU funzt!” team, as well. The (german) video is now available on Youtube (OpenPhoenux interview is starting at 5:00):
All in all it was a very nice stay in Berlin. I especially enjoyed meeting and chatting with guys who already owned a GTA04. It looks like the community is growing again!